Description
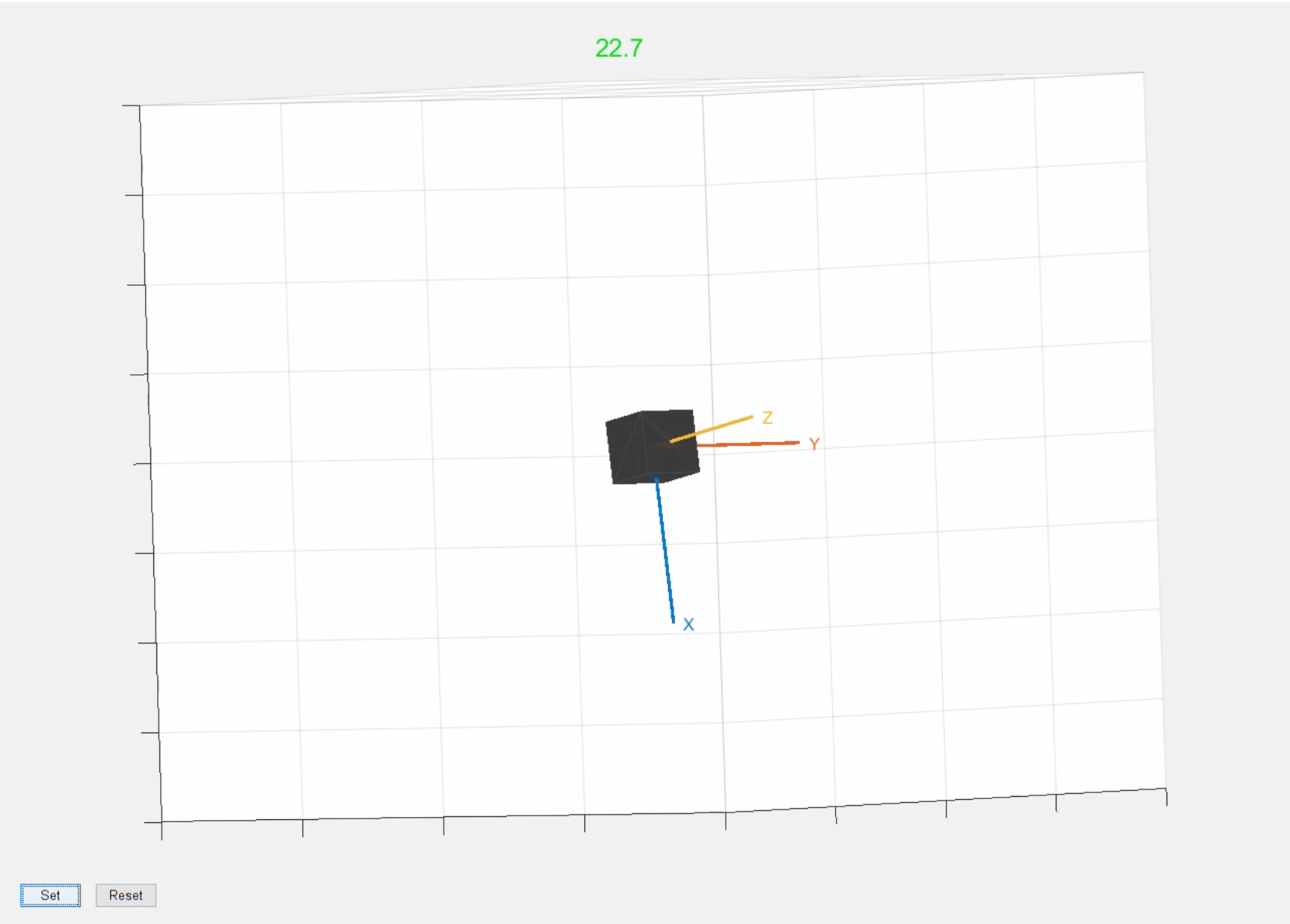
Project for Summer Research Scholarship at the Auckland Bioengineering Institute. I used SOLIDWORKS to design a set of standard manipulation objects capable of encasing a Shimmer3 wireless multi-sensor unit and constructed two sets, one using Ecoflex 00-30 silicone and the other using 3D printed PLA plastic. I imported the Shimmer3 data into MATLAB to visualise the movement of the standard manipulation objects and was able to estimate object orientations in near real-time.